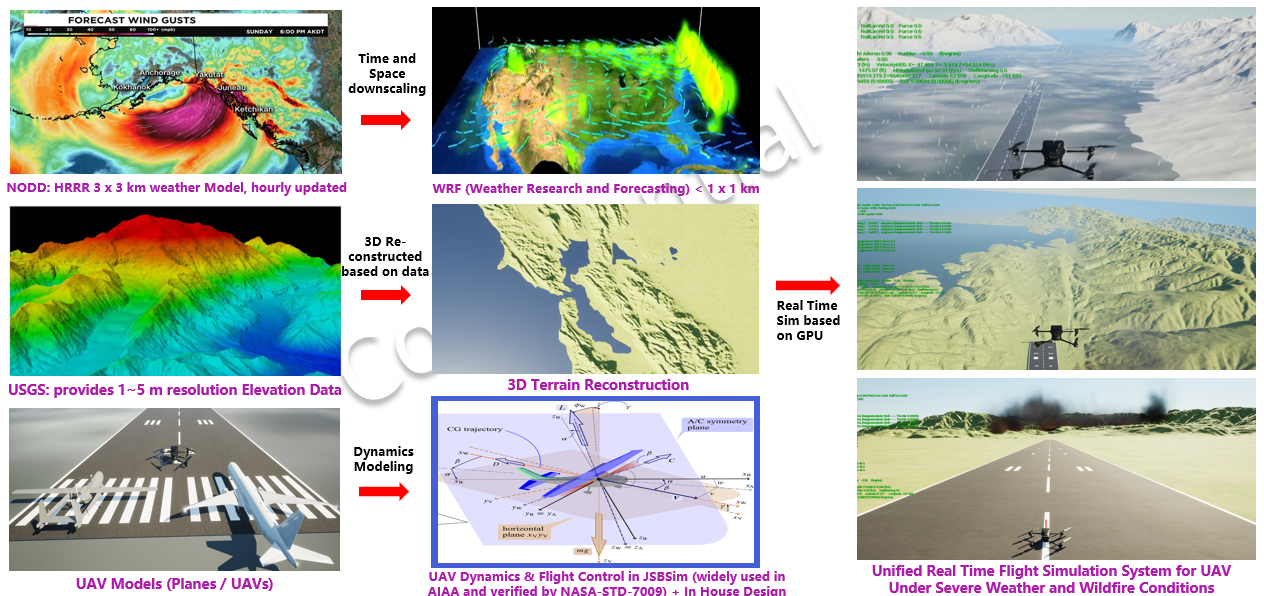
Environment and Data Layer
- NODD/HRRR weather ingest and WRF downscaling for local fields.
- USGS terrain reconstruction for high-resolution topography.
- Scenario definitions for wind shear, gusts, and wildfire disturbance.
- Time-synchronized replay for repeatable engineering runs.